The Smart Lander for Investigating the Moon (SLIM), developed by Japan’s space agency JAXA, became the first lunar lander to achieve an autonomous landing within just 100 meters of its target in early 2024. This breakthrough captivated researchers and space enthusiasts alike. Equipped with a near-infrared multi-band camera, SLIM provided high-resolution images of the lunar surface and made the exciting discovery of olivine within a lunar rock, offering new insights into the Moon’s geology.
The project brought together a team of prominent scientists, including Professor Kazuto Saiki, Director of the Earth and Space Exploration Center (ESEC) at Ritsumeikan University, along with Associate Professor Hiroshi Nagaoka and Assistant Professor Yusuke Nakauchi, both affiliated to the Research Organization of Science and Technology, Ritsumeikan University. Their contribution—the near-infrared multi-band camera, SLIM’s sole scientific instrument—is now helping to analyze SLIM’s findings. The team is also working on cutting-edge observation technologies for future space missions.
Research Introduction
SAIKI : Humanity is entering a new phase of space exploration, one that goes beyond the brief Apollo-era visits to the Moon. Now, with private companies involved, we are on the verge of sustainable exploration of both the Moon and Mars. This era could mark a turning point in human history as we learn to utilize extraterrestrial resources.
As the head of ESEC, my goal is to support this transformative period with the power of science. ESEC will not only focus on space exploration but also on the Earth itself. Our planet has experienced environmental catastrophes that could have wiped out all life forms. Given that human history is a tiny fraction of the Earth’s timeline, even the near future is uncharted territory for us. At ESEC, we are committed to ensuring humanity’s survival on the Moon, Mars, and here on the Earth.
NAGAOKA : My research focuses on the Moon’s formation, which could help us understand how the Earth and other rocky planets were formed. Since the Moon cooled and solidified much earlier than the Earth, it likely retains rocks from the early stages of the planet formation process—information that has long been erased from the Earth’s surface. Analyzing the Moon’s composition and the conditions during its formation will give us valuable insights into the formation of rocky planets, including the Earth.
With the U.S.-led Artemis mission bringing the prospect of manned lunar exploration closer to reality, our team is developing observation and sampling technologies to support these missions. We are preparing to analyze samples returned to the Earth while refining tools to assist landers and rovers in identifying lunar samples on-site.
NAKAUCHI : Infrared spectroscopy is one of the most powerful techniques for identifying and analysing the composition of planetary materials. By observing how substances interact with infrared light, we can determine their makeup and even select return samples from the Moon or other planets. My team is developing an advanced infrared spectroscopy camera for use on future lunar landers. However, lunar exploration faces a unique challenge: space weathering. The Moon’s surface is constantly bombarded by solar wind, cosmic rays, and micrometeorites, which alter the optical properties of its rocks. To accurately interpret reflected light spectra from the lunar surface, we must first understand how space weathering affects these readings. Interestingly, lunar exploration has hinted at water production on the Moon caused by space weathering.
Our goal is to further explore this phenomenon through experiments simulating the solar wind’s impact on rock surfaces.
Moon Sniper SLIM: The World’s First High-Precision Moon Landing
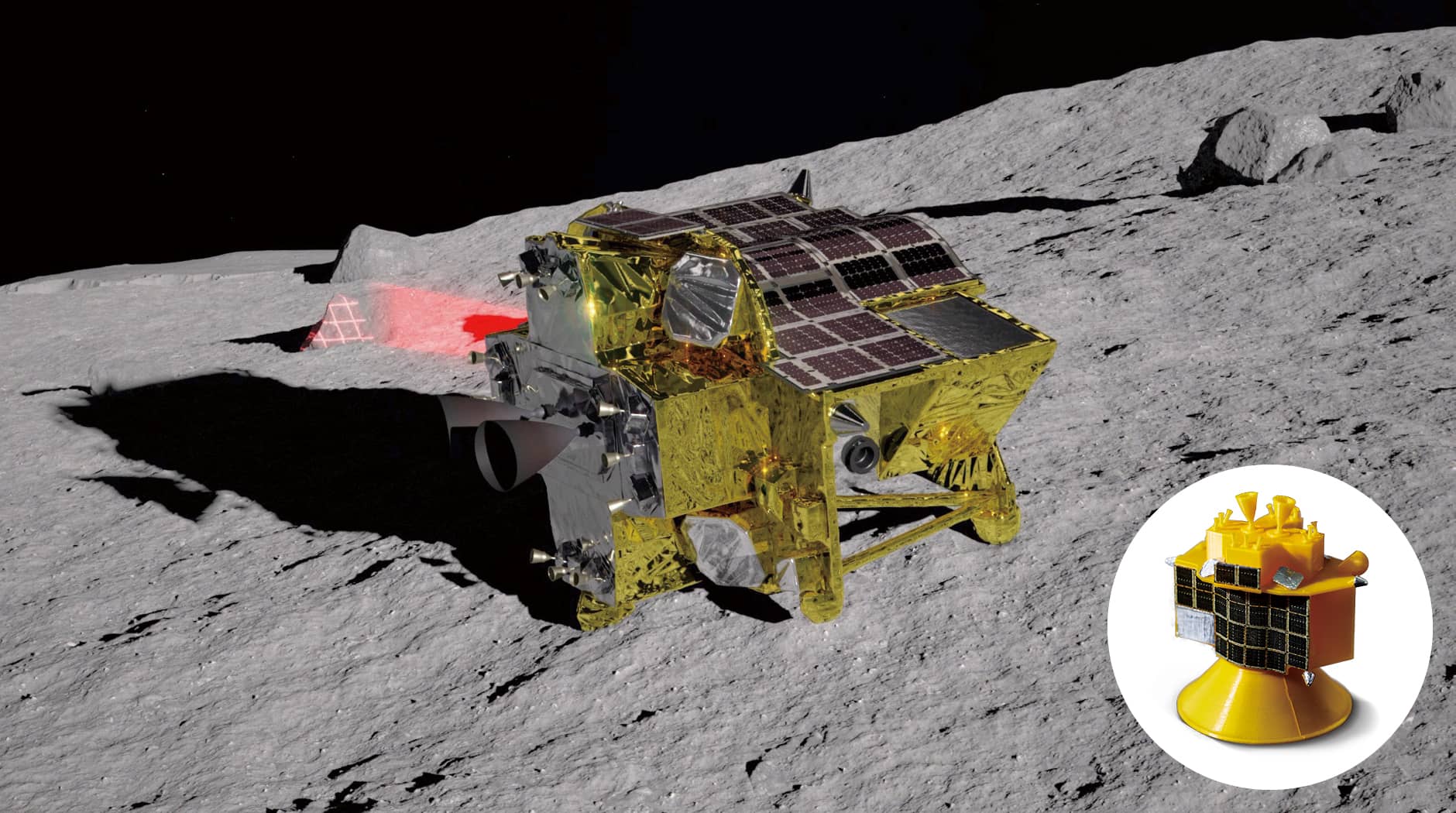
An image CG of SLIM observing rocks using MBC (in originally envisaged landing posture).
NAKAUCHI : The Smart Lander for Investigating the Moon, or SLIM, was a high-precision lunar landing demonstration mission designed to achieve a pinpoint landing on the Moon. In past lunar explorations, dating back to the Apollo program, a successful landing meant touching down within a range of a few to several dozen kilometres from the target. That was the technical limit of accuracy. However, SLIM drastically reduced that margin, aiming to land within a 100-meter radius.
SLIM was launched on September 7, 2023 (JST), and reached the Moon using a low-propellant trajectory. Once in lunar orbit, it began observing the surface while confirming that all its instruments were functioning properly. It then initiated its descent, using image-based navigation—one of the mission’s key technologies—to determine its precise location. Just before landing, SLIM was set to release two small rovers: one designed to hop across the lunar surface for exploration, and the other that could transform and roll around to capture images of the lander and its surroundings.
SLIM targeted a landing site at 13.3°S, 25.2°E, on the Moon’s southern side. Near this location lies a crater named SHIOLI, which has captured the interest of scientists due to its relatively fresh condition. Based on data from Japan’s Kaguya lunar orbiter, we believe this area could reveal valuable information about the Moon’s interior.
In the early hours of January 20, 2024 (JST), the three of us anxiously watched SLIM’s landing from JAXA’s mission control, monitoring its progress on the Quick Look screen. Since SLIM was navigating autonomously, there was nothing we could do but wait for the outcome. SLIM’s altitude gradually decreased, and to our relief, it successfully touched down on the Moon! However, the altitude readings continued to fluctuate, and the data soon showed that SLIM was sinking into the lunar surface, eventually coming to rest in what appeared to be an upside-down position.
SAIKI : Amid the chaos of trying to make sense of the situation, the operations team reached out to us. With everything happening so quickly and uncertainty still lingering, they asked if we wanted to proceed with capturing images using the multi-band camera (MBC) that we had meticulously developed and installed on SLIM. Despite the unexpected circumstances, the opportunity to gather valuable data was still on the table.
NAKAUCHI : After SLIM went into hibernation for the first time, we discovered that during the landing, it had been automatically taking images every few seconds. Incredibly, one of those images captured a thruster that had detached from the main body, and we immediately realized it was the cause of the abnormal landing posture.
First High-Resolution Image Taken on the Lunar Surface
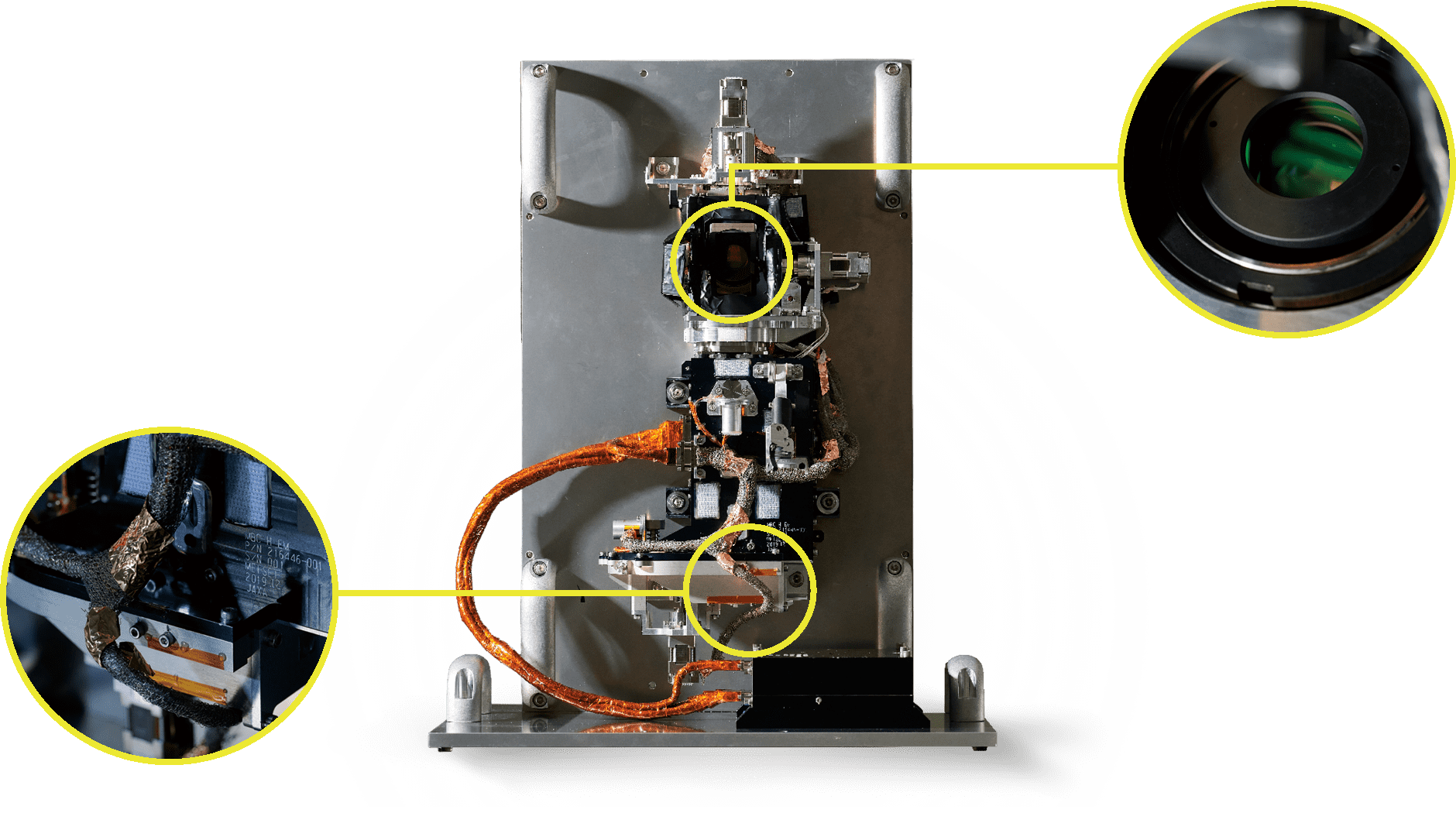
Right: For weight reduction, the camera captures images of what is reflected in the mirror that tilts up and down, left and right.
The multi-band spectroscopic camera packs a complex mechanism of a tiltable mirror, autofocus mechanism, and filter turret into a 4 kg body. (Shown here is an engineering model (ground test model) made exactly like the flight model.)
NAKAUCHI : Our MBC was an infrared observation camera equipped with band-pass filters to observe 10 different wavelengths. It was the only scientific observation device installed on SLIM, the landing demonstrator.
SAIKI : One of the challenges with the MBC was that it had to be the first domestic camera of its kind to include an autofocus mechanism. While autofocus is not necessary for shooting from orbit, it becomes essential when we want to shoot images of rocks both near and far from the landing site. Another challenge was to make the camera smaller. Since SLIM cannot move after landing, we needed a way to adjust the view of the surroundings. Rather than making the entire camera move, which would be too heavy, we opted to tilt only the mirror attached to the camera.
NAKAUCHI : From orbit, the resolution for lunar surface imaging was limited to about 30 centimeters, which meant that smaller rocks were not visible. We hoped that landing on the Moon would allow us to capture rocks as small as 10 to 15 centimeters, but without knowing the precise locations of suitable targets, we designed the camera to focus within a range of 1.5 to 30 meters.
When we were asked if we wanted to start shooting, we were taken by surprise and quickly began preparing for the operation. At that time, SLIM was running on its main battery, as the solar panels were not generating power. We had to complete the imaging before the battery ran out. With the battery life uncertain, we compressed a task that usually takes five hours into just 45 minutes. Despite the time constraint, we successfully operated the camera and captured images of the area around the landing site. We identified several scattered rocks and selected six for detailed observation.
SAIKI : It was decided that the six rocks would each be named after six different breeds of dogs. We could have used letters of the alphabet or numbers, but we thought it would be better to use common nouns that are easy to remember, in order also to avoid a mix-up. We thought it would be appropriate to use names that would intuitively convey differences in size, as we could guess that the rocks in the foreground were smaller and those in the distance were larger. At first, I suggested using names of fruits, but no one in the MBC team was interested. Then I suggested using names of dogs instead, and everyone started naming the different breeds.

A scanned mosaic image taken immediately after the SLIM landing, created by combining 257 low-resolution images. Gray areas are those omitted due to operational time constraints.
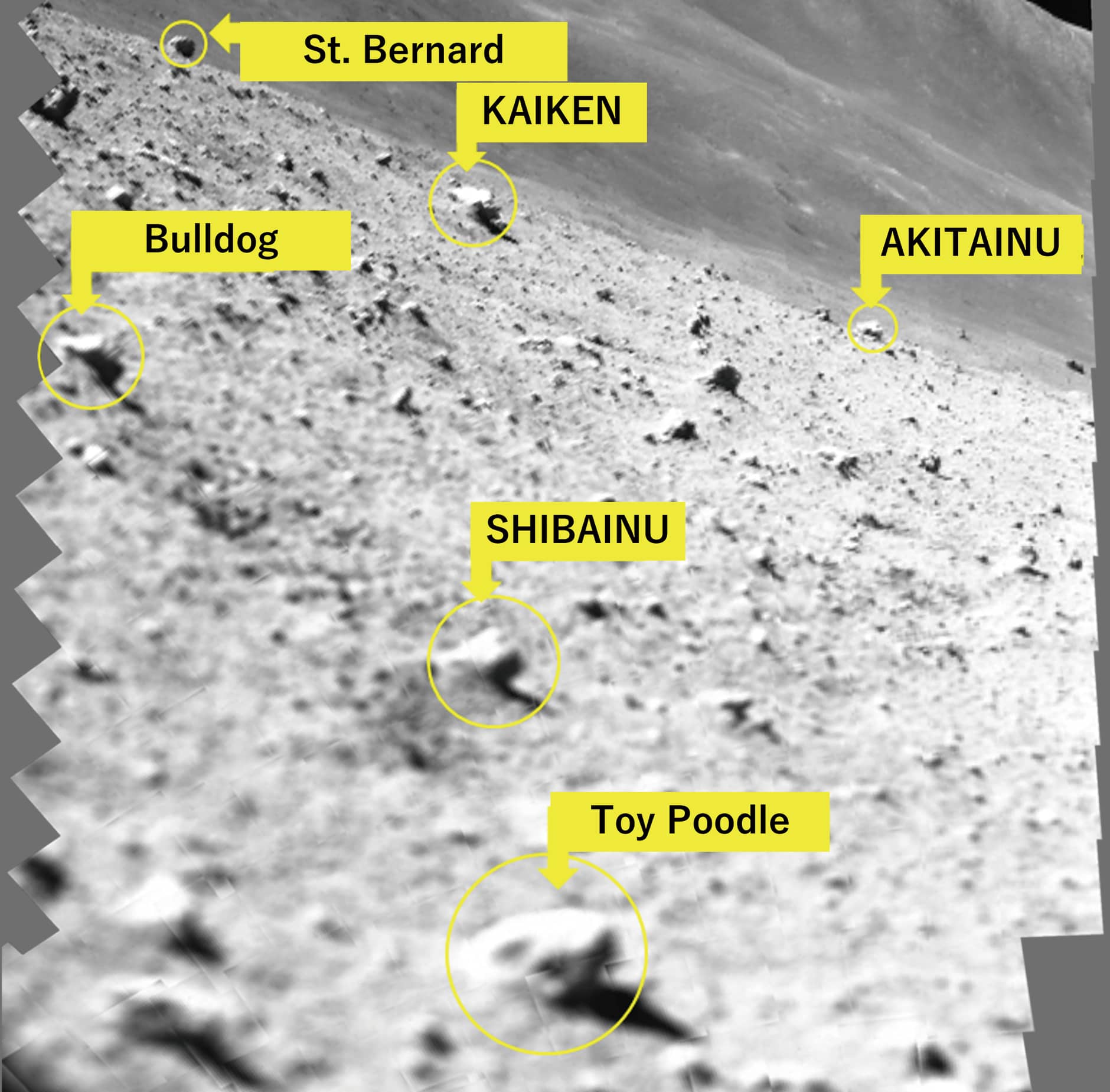
Hoping to revive SLIM, whose batteries had been disconnected immediately after landing without the solar cells generating power, rocks were named after dog breeds for possible future observation.
NAKAUCHI : Shortly after the images were shot to get an idea of what is going on around the landing site, the main battery ran out of power and SLIM was switched to the solar-panel operation mode before going into hibernation, but it was unable to generate power from the panels. Normally, after capturing a few images, we would immediately start analyzing which rocks to examine more closely. However, due to time constraints, we were unable to proceed further. Communication with SLIM was then lost for a week or so. During this time, we were able to confirm from images sent by the small rover, which had detached during the landing, that SLIM had landed upside down.
On January 28 (JST), communication with SLIM was restored, and 10-band spectroscopy was carried out this time for each rock, bringing the total number of rocks that were observed to 10. One of the rocks, named “Akitainu,” is about 20 meters away from the SLIM main body, but a clear, high-resolution image of it has been made available to the public*. Everything came together successfully, including the precise landing and the effective focus of the MBC. I was truly relieved when we completed the multi-band spectral imaging of all 10 rocks.
*Institute of Space and Astronautical Science (ISAS)
SAIKI : Near-infrared spectroscopy has previously been used to observe the regolith on the lunar surface. Since near-infrared light penetrates only a short distance into minerals, we had to rely on a technique where light reflected from one particle could pass through another to observe the surface. This is the first time we have been able to perform near-infrared spectroscopy on the surface of a solid rock at a high spatial resolution. We anticipated that the surface of lunar rocks, which are roughened by space weathering, would reflect and transmit infrared light similarly to lunar regolith. Based on this expectation, we proposed and successfully implemented a near-infrared camera. It is gratifying to see that our results matched our expectations.
Further analysis of the images revealed that one of the rocks contained a chunk of olivine, measuring a few centimeters in size. Olivine is a major component of the Earth’s mantle. While we will need to conduct future analyses to determine if this olivine has a composition similar to those on the Earth, this discovery could provide valuable insights into the Moon’s formation process.
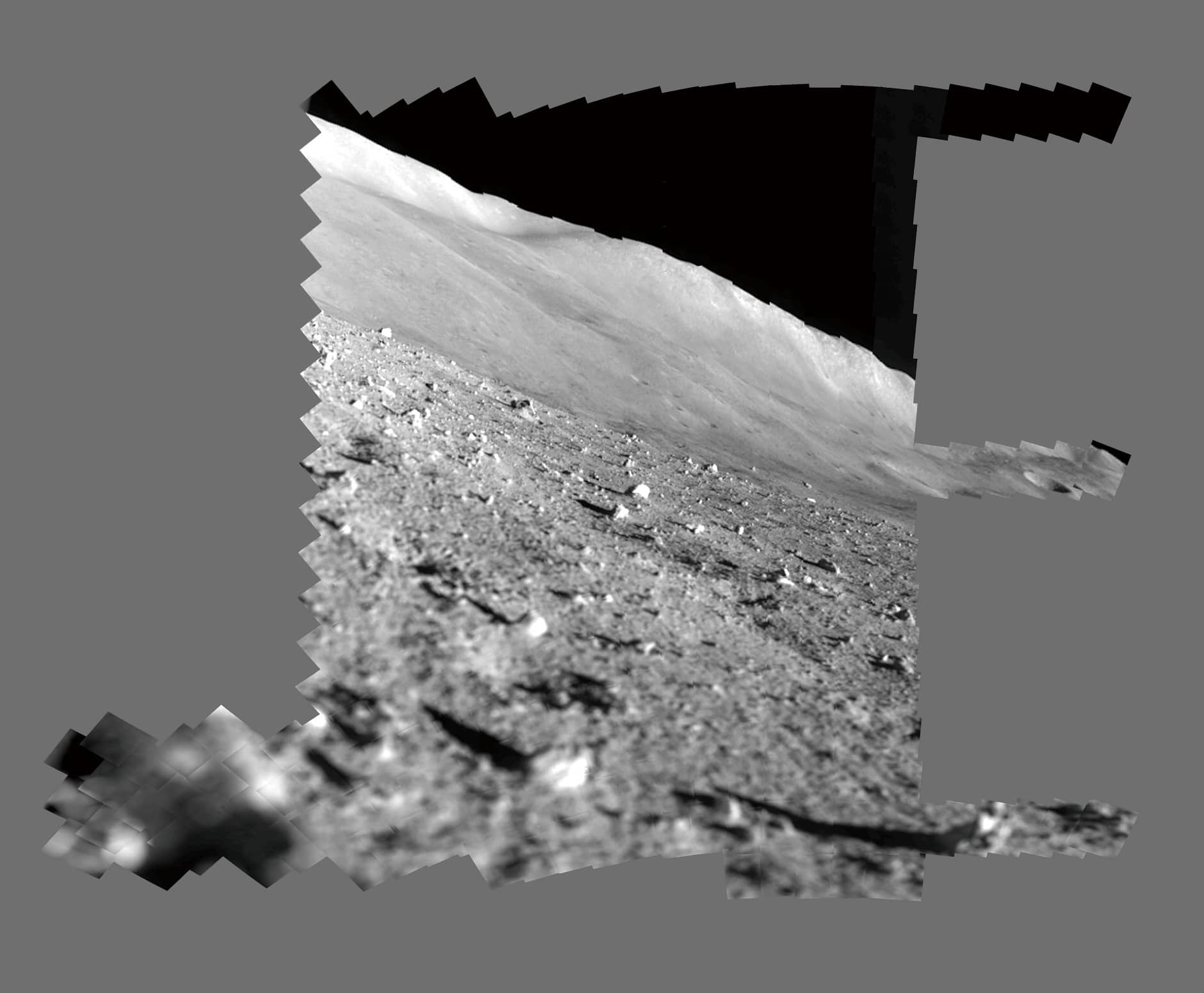
A scanned mosaic image taken after SLIM was restored following the solar cells being exposed to sunlight again. Note that the direction of the shadow is reversed from the scanned mosaic image immediately after landing.
Lunar Polar Exploration Project
SAIKI : SLIM will be succeeded by the Lunar Polar Exploration Mission (LUPEX), a joint effort between JAXA and the Indian Space Research Organization. One of LUPEX’s primary objectives is to explore a crater at the Moon’s south pole, specifically its permanently shadowed regions where sunlight never reaches. In the 1990s, exploration by an American spacecraft indicated that these shadowed areas might contain water ice. Later in 2007, Japan’s KAGUYA lunar orbiter became the first spacecraft to successfully examine the bottom of Shackleton Crater, one of those craters with a permanent shadow, which is 21 kilometers in diameter and located near the exact south pole. The topographical information it provided at that time revealed that the interior of the crater was in a permanently very low-temperature state below 90K. At such low temperatures, ice would not easily evaporate, suggesting it may have been preserved for hundreds of millions of years.
If water can be found on the Moon, it could be split into hydrogen and oxygen through electrolysis, bringing us closer to sustaining human activities on the Moon. LUPEX aims to investigate the quantity and distribution of water on the Moon. The mission plans to descend into these permanently shadowed regions to confirm the presence of water ice and, if found, to take core samples for in-situ analysis.
The Artemis 3 campaign, which aims to return humans to the Moon for the first time in decades, is currently in progress with collaboration from over 40 countries, including the United States. Candidate landing sites for Artemis 3 are located on small ridges around the craters at the South Pole of the Moon with the permanent shadow, including Shackleton Crater. In other words, the Artemis campaign is also an attempt to get to the Moon’s water resources.
Given that the Sun is low on the horizon at the lunar poles, a spacecraft landing in these regions might receive no sunlight at all if not precisely positioned. In this context, the pinpoint landing technology developed by SLIM has set a crucial precedent for future polar exploration missions like LUPEX.
Further Future beyond LUPEX
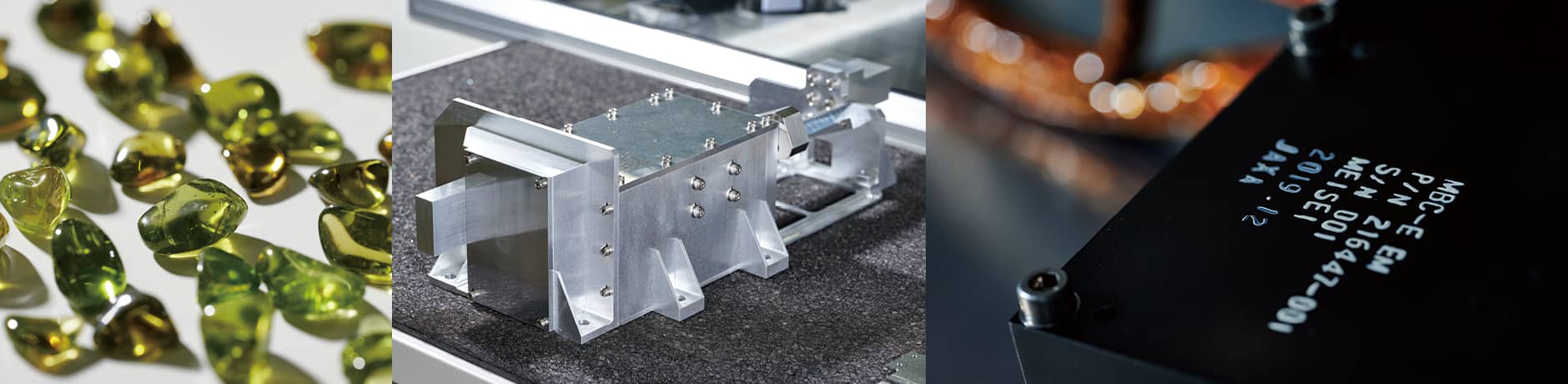
Center: MBC's structural test model used during vibration testing of the SLIM main body.
Right: The electrical circuit block controlling MBC. Weighs approx. 4 kg, together with the block for the camera proper. (Shown here is an engineering model.)
NAGAOKA : Following SLIM and LUPEX, Japan is now investigating further lunar exploration possibilities using rovers. We are actively involved in these efforts. Meanwhile, there are more and more foreign missions exploring the Moon, such as South Korea’s KPLO mission, which is continuing observations with an orbiter. India’s Chandrayaan-3 lander successfully landed in the South Pole region for the first time shortly before SLIM. Other countries are also planning missions to the South Pole to search for water.
We are currently working to develop new scientific observation techniques and equipment for use in Japan’s future Moon landers and manned pressurized rovers that are expected to follow LUPEX. One such device is a grinder for scraping the surface of rocks. We need to scrape the surface of rocks to flatten them, in order to study the very fine rock structure using spectrometers and learn how the rocks were formed.
NAKAUCHI : Grinding on the Moon is very different from grinding on the Earth. On the Earth, water is used to wash away chips and cool the surface of grindstones and rocks that has been heated by friction. On the Moon, however, we have to develop a method of grinding without water. This is because even if we could obtain water ice from the permanent shadow, it would sublimate in the vacuum environment. In addition, the rocks on the lunar surface are known to be quite hard, and the existing grinding tools would be ineffective due to considerable wear on the tool side. We are currently working with Tokyo University of Agriculture and Technology and grindstone manufacturers to conduct experimental development for tools that can withstand the hardness of lunar rocks.
NAGAOKA : Further exploration of water on the Moon is also in progress. I am involved in developing MoMoTarO, a radiation detector designed to locate water in lunar soil using neutron and gamma rays. At Professor Kobayashi’s laboratory at the College of Science and Engineering, a fellow member of ESEC, we are testing this detector with simulated lunar soil and a radiation source to replicate the lunar surface’s radiation environment and assess its ability to detect water content.
Looking ahead, human exploration of the Moon is on the horizon. JAXA, Toyota, and other private companies are currently developing a manned pressurized rover with the goal of transporting astronauts to collect samples. Using handy, compact analyzers, the astronauts will perform analysis in the field, identify and collect samples of high scientific value, and bring them back to the Earth. We are currently working to develop a portable laboratory package that can be installed on a manned pressurized rover, equipped with multiple handheld analyzers. Our future objective is to use artificial intelligence to analyze data in the field and determine if samples are worth bringing back to the Earth, thereby contributing to sample return missions.
As the Frontrunners of Lunar-Resource Science
SAIKI : I am not only in the current quantities of water and mineral resources but also in their origins, the processes by which they were gathered, their future behavior if left undisturbed, and the potential for sustainable human use. Gaining insights into these aspects is crucial for developing the humanosphere, a key objective of ESEC.
NAGAOKA : The lunar samples hold a wealth of information that is unique and not found on the Earth. I think it is important to develop analysis and curation facilities to accumulate this kind of information. At the moment, NASA has a virtual monopoly on the lunar return samples, but I would like to see the establishment of comparable facilities in Japan so that we can analyze, store, and pass on the samples to future generations.
NAKAUCHI : I strive to remain a pioneer in my field and enhance the feasibility of our projects so that people will say, “If ESEC is involved, the project will succeed.” In Japan today, the development time from project launch to actual deployment is becoming shorter and shorter, but I want to create an organization that can develop the technology and equipment it deems necessary in advance, just as researchers involved with NASA do. This forward-thinking approach will ensure that we are well-prepared and can consistently deliver successful outcomes.
SAIKI : When people start living on the surfaces of the Moon and Mars, not only scientists and engineers, but everyone will have a connection with space, and the purpose of going into space will be infinite. At ESEC, we are committed to advancing space exploration through collaboration with experts from diverse fields. Our goal is to position ESEC at the forefront of the evolving wave of space exploration and development.